
▲ 전체 시스템 모습

▲ Display Module (Dashboard)

▲ Engine 및 Clutch 구동부

▲ 적외선 거리 센서 (앞차와의 거리 측정)

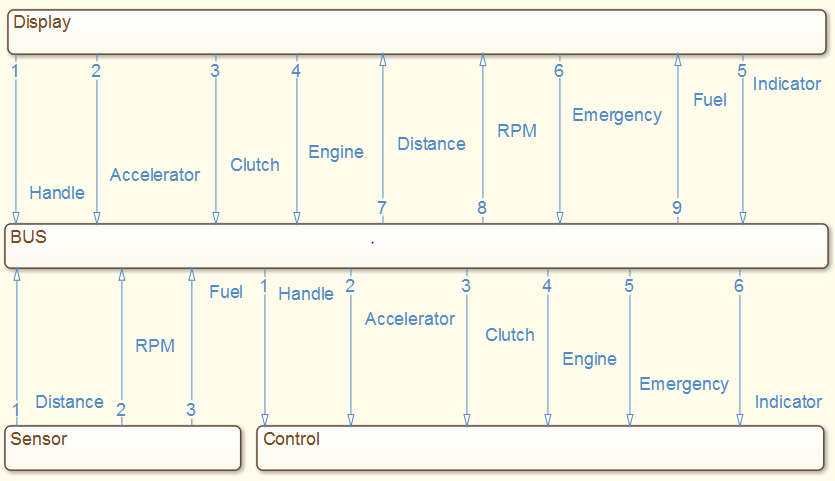
▲ CAN BUS 프로토콜.
| 작품 설명 | 자동차 내부의 통신 버스인 CAN을 중심으로 한 주변 장치들을 그대로 구현한 시뮬레이터입니다. |
|---|---|
| 주요 기능 | * AT90CAN128 보드 3개를 이용하여 BUS를 구성하였으며, CAN Protocol을 통해 필요한 데이터를 주고받습니다. * Display Module : 자동차의 Dashboard에 해당하며, LCD가 장착되어 앞차와의 거리, 엔진 RPM, 연료 잔량, 방향지시등과 같은 상태 정보를 표시합니다. 또한, 핸들에 해당하는 가변저항 및 엑셀에 해당하는 가변저항, 방향 지시등 제어 스위치, 비상등 스위치, 엔진 시작 스위치, 클러치 스위치와 같이 운전석에 존재하는 요소들도 포함하고 있습니다. * Control Module : CAN BUS를 통해 Display Module로부터 수신된 정보를 토대로 조향 모터와 클러치, 엔진을 제어합니다. 두 개의 방향 지시등도 이곳에 포함되어 있습니다. * Sensor Module : Engine RPM, 앞 차와의 거리, 연료 잔량에 대한 정보를 수집하여 CAN BUS를 통해 Display Module로 송신합니다. |
| 제작 기간 | 약 2주일 (2013.12.10 ~ 24) |
| 관련 분야 | 전자 공학,임베디드 시스템 |
| 제작 동기 | * 3학년(2013-2학기)에 수강했던 '임베디드 제어 시스템' 교과목의 Team Project입니다. * 팀원 : 신동헌, 이승준 CAN 통신을 활용한 작품 제작이 팀 프로젝트 주제로 주어졌고, 역시 팀원과 함께 주제를 고민하다가 CAN 통신이 유래되었다는 자동차 내부 통신 시스템을 모방해서 구현해 보기로 하였습니다. |
| 제작 소감 | CAN BUS Analyzer 없이 펌웨어를 작성해야 하는 상황이었기 때문에, 통신이 되지 않는 등 약간의 어려움도 있었습니다. 게다가 AVR의 CAN관련 Register들이 다소 복잡한 구조로 얽혀 있었으므로 완성됨 펌웨어를 작성하기까지 Data Sheet를 수차례 다시 읽어야만 했습니다. 이러한 어려움을 극복하고 결국 성공적으로 CAN 통신을 구현할 수 있었습니다. 이전까지는 SPI나 I2C, USART와 같은 1:1 혹은 1:N 통신만을 사용해 왔었는데, 이번 기회를 통해 N:N 통신 중 하나인 CAN 통신을 처음 접하고 실습해 볼 수 있었습니다. |
▲ 전체 시스템 모습
▲ Display Module (Dashboard)
▲ Engine 및 Clutch 구동부
▲ 적외선 거리 센서 (앞차와의 거리 측정)
▲ CAN BUS 프로토콜.


 Analysing Security Vulnerability of Commercial Wire-wireless Routers
Analysing Security Vulnerability of Commercial Wire-wireless Routers
 전국 학생식당 메뉴 포탈 - 메뉴플렉서(Menuplexer)
전국 학생식당 메뉴 포탈 - 메뉴플렉서(Menuplexer)
 Timer-based Fault-Tolerant Routing Algorithm on Broken Mesh Topology
Timer-based Fault-Tolerant Routing Algorithm on Broken Mesh Topology
 Qualcomm IT Tour 홈페이지
Qualcomm IT Tour 홈페이지
 자동 문단속 냉장고
자동 문단속 냉장고
 Smart Peltier Air Conditioner
Smart Peltier Air Conditioner
 Automobile CAN Communication System Simulator
Automobile CAN Communication System Simulator
 2-3-4 Tree
2-3-4 Tree
 32bit Multi Cycle MIPS CPU
32bit Multi Cycle MIPS CPU
 8bit DAC를 활용한 Wave 음악 재생기 - DAC Wave 8
8bit DAC를 활용한 Wave 음악 재생기 - DAC Wave 8
 Computer Generated Random Variable Simulator
Computer Generated Random Variable Simulator
 Sequential Adder & Multiplier with 7-Segment display
Sequential Adder & Multiplier with 7-Segment display
 3D 공간 스캐너
3D 공간 스캐너
 무선 배틀 테트리스 게임기 - BATENDO
무선 배틀 테트리스 게임기 - BATENDO
 BIS 연구실 소개 홈페이지
BIS 연구실 소개 홈페이지
 웹 기반 시간표 자동 조합 프로그램 - BATTO11
웹 기반 시간표 자동 조합 프로그램 - BATTO11
 전자동 커튼3
전자동 커튼3
 HAKKO 온도조절 인두기
HAKKO 온도조절 인두기